These do not show the efficacy of a steep crossover, they are just filters used along the way.
I don't understand Allen.
I thought people would recognize the point of the step plots was to show you can have steep xovers without the group delay and time smear usually associated with them (IIR).
They were not meant to show any efficacy.....
The text was meant to show their efficacy / advantages. 😉
You postulate that group delay is the problem. I disagree. The desire for a steep crossover had to come from somewhere, there's always an issue involved. Crossing steeper than necessary is, well, unnecessary and delay is just a side effect of the process.
JRiver is available for Linux, but the Convolver is not, I am afraid. How do I get the IRs for convolution? I still imagine interface like with "normal" crossovers - select frequency, order and that is it. I guess it is not that easy with FIR.
You postulate that group delay is the problem. I disagree. The desire for a steep crossover had to come from somewhere, there's always an issue involved. Crossing steeper than necessary is, well, unnecessary and delay is just a side effect of the process.
I've copied some of my post...
It describes the impetus for the desire for steep.
Me? I find improved polars as necessary,
...especially when the process can be devoid of any delay side effect...that's the only thing unneccesary imo/ime, the delay side effect
"Where I think steep really helps is with off-axis uniformity.
Particularly vertical, but horizontal too.
-When the frequency range of two drivers producing the same sound overlaps, i keep measuring that minimizing the width of the overlap range helps reduce changing response in the overlap....i mean, pretty simple really..
-another nice thing about steep and linear, is that it allows for relatively easy movement of the xover freq up and down in search of best pattern matching.
All that matters is whether the passband mag and phase performance have stayed flat at the new xover points...which is usually the case when out of band flattening was applied."
JRiver is available for Linux, but the Convolver is not, I am afraid. How do I get the IRs for convolution? I still imagine interface like with "normal" crossovers - select frequency, order and that is it. I guess it is not that easy with FIR.
Oh yeah re Convolver and Linux..
I remember now, I had to change my JRiver ID, running Linux on a NUC, to running JRiver on Win7....uhg....
REW/ ARTA into rephase works
It could also be said that too steep breaks the connection. Different speakers, different result. The way through this IMO is to understand why you need some part crossed as soon as you do.
You seem to be offering from the point of view of using a crossover as a tool to find a result based on what you hear?
You seem to be offering from the point of view of using a crossover as a tool to find a result based on what you hear?
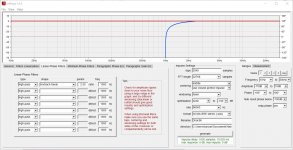
It's exactly that easy to generate the crossover slope using rephase. Screenshot attached below choose linear phase or minimum phase choose frequency type and any other parameter associated with it, choose the number of taps you want, type of output file you need and hit generate. Rephase shows you what it generated compared to the theoretical ideal and you can decide to change parameters to make a better match if it isn't good enough.JRiver is available for Linux, but the Convolver is not, I am afraid. How do I get the IRs for convolution? I still imagine interface like with "normal" crossovers - select frequency, order and that is it. I guess it is not that easy with FIR.
BruteFIR works with Linux but that is not as simple to operate as Jriver. For cheap hardware look for Chinese DSP boards using Analog Devices SHARC processors. They can use Sigma Studio which is difficult to learn but very flexible. MiniDSP uses .bin files which rephase can create directly.
I've never tried it but this post seems to suggest that convolution is working in Jriver linux
DSP Studio running on a Raspi
Attachments
Last edited:
A lot of Mark's speakers are live sound oriented where specific pattern control and maximum output is required. This is one of the areas where steep slopes can be beneficial.It could also be said that too steep breaks the connection. Different speakers, different result. The way through this IMO is to understand why you need some part crossed as soon as you do.
You seem to be offering from the point of view of using a crossover as a tool to find a result based on what you hear?
One thing that be useful in prototyping is to be able to vary the slope and type of crossover and hear the difference. By flattening the driver with EQ time aligning and using linear phase slopes you can change the slope and type at will without having much other interaction.
I think that is what Mark is getting at by saying you can hear the different results easily and decide if the change in frequency or slope has given an improvement.
Yes, that's some of what I was assuming.
When Camplo quoted all those comments in the first post, I saw some crossed purpose, mish-mash of ideas that had to be separated first before they could be made sense of.
When Camplo quoted all those comments in the first post, I saw some crossed purpose, mish-mash of ideas that had to be separated first before they could be made sense of.
OK, this is the concern I mentioned in another thread -
How could you avoid this happening off-axis, where the distances to the individual drivers vary in general? Did you ever actually measure phase response off axis for steep slope crossover? Or am I missing something?
How could you avoid this happening off-axis, where the distances to the individual drivers vary in general? Did you ever actually measure phase response off axis for steep slope crossover? Or am I missing something?
Attachments

Last edited:
Well, would it look that much different for a less steep crossover ? The only difference would be that the step is less steep. You can always have some "unnatural" group-delay performance off-axis with any crossover topology.
Keep in mind that constant group-delay has the biggest relevance on the design axis anyway.
Regards
Charles
Keep in mind that constant group-delay has the biggest relevance on the design axis anyway.
Regards
Charles
Last edited:
Sure, the less overlap/the steeper slopes, the higher the group delay. It may well be the case that it is not an issue in practice - and I'm curious about that as I have never tried myself - i.e. with crossover like 96 dB/octave. Is that still not an issue? Because, especially with horns, the delay between drivers may change even along horizontal axis quite easily and one don't want to be limited to one axis only.
So, is phase (i.e. waveform shape) consistency between direct and reflected sound important, or not? Wondering how to test that - maybe in a anechoic chamber, to simulate a phase-distorted reflection.
Our hearing uses the interaural delay for lateralisation. This is done with the first arrival of a signal. Reflections are therefore not used for that purpose.
One will still locate a virtual source in the same directio if group-delay distortion is higher but the "image" is smeared to some degree.
Regards
Charles
One will still locate a virtual source in the same directio if group-delay distortion is higher but the "image" is smeared to some degree.
Regards
Charles
Missed that one:
Long FIR crossovers can show off-axis pre-ringing if one doesn't pay proper attention. There are JAES papers dealing with the audibility of that.
Regards
Charles
Sure, the less overlap/the steeper slopes, the higher the group delay. It may well be the case that it is not an issue in practice - and I'm curious about that as I have never tried myself - i.e. with crossover like 96 dB/octave. Is that still not an issue? Because, especially with horns, the delay between drivers may change even along horizontal axis quite easily and one don't want to be limited to one axis only.
Long FIR crossovers can show off-axis pre-ringing if one doesn't pay proper attention. There are JAES papers dealing with the audibility of that.
Regards
Charles
The question is to what degree must the reflection be "similiar" to a direct sound for not to bother. Usually the amplitude spectrum is mentioned - we want the reflected sound to be similar in frequency content, but what about phase? Is that irrelevant even in case of strong first reflections?
Going back to FIR pre-ringing and steep FIR filters. Over at ASR Dr. Ulrich Brüggemann posted a sample without/with excessive pre-ringing and it was extremely audible.
Pre-ringing with linear phase room EQ filters | Audio Science Review (ASR) Forum
ShortTest.flac - Google Drive
Is there a general rule for a threshold of the order of the time corrected FIR filter, above which pre-ringing becomes clearly audible in home applications?
Pre-ringing with linear phase room EQ filters | Audio Science Review (ASR) Forum
ShortTest.flac - Google Drive
Is there a general rule for a threshold of the order of the time corrected FIR filter, above which pre-ringing becomes clearly audible in home applications?
So you want a steep crossover? This seems to be because you are starting off with a combination of drivers that will guarantee some problems and you want to try and "fix" it with a steep crossover. The 8" will start to beam before you can cross it over to the 1". Crossing over lower helps a little, but this will stress the tweeter. Using a higher order crossover actually makes the situation worse, since many will have a sharp "knee", which means that there is more power going to the tweeter just above the knee.
The solution would be to use a smaller woofer, or go 3 way. Or just live with the lobing issue, or use a tweeter in a waveguide like the SEOS-8, which is meant to accept some dome tweeters like the Dayton RS-28A/F. The problem is that the 8" is getting directional towards the crossover point, while a 1" dome will be omni there, and the change in power response at the crossover point is can make the system sound tonally "off" in the listening room, especially in smaller sized rooms. On the other hand, the waveguide has some directionality to it as low as 2k, and that better matches the woofer's directionality resulting in a smooth transition in power response at the crossover. This typically sounds better in the room. Also the wavguide will boost up the lower end of the tweeter's response, and you have to flatten this out by cutting power. This has the effect of increasing the system power handing and decreasing tweeter distortion around the crossover point. Give it a look.
Regarding group delay and high order crossovers: even LR4 has a peaking group delay, and results in a different group delays for the woofer and tweeter in their passbands. Scroll down towards the bottom of section "F" in this web page for an example of this:
Linkwitz on Group delay and transient response
The question is is the non-uniform GD enough to cause audible effects? Even though LR4 is peaking, it's typically not exceeding the threshold of about 1.5msec of GD around 1k-2kHz that is purportedly audible on music signals. The threshold could be a bit higher, but there is very little data to support it in the literature. Also, this threshold gets much larger away from this critcal band of hearing. Using a high order crossover for your subwoofer, for example, is nothing to worry about.
The peaking GD is due to high Q poles in the crossover. When the pole Q starts exceeding about 2 or 3 this usually means high GD. An example of this is found at the link provided above. Of course I am talking about analog or IIR digital filters here. With FIR you can do whatever you want, but I feel that is a fallback position many people go to without really needing to, as FIR has its downsides as well (latency, pre-ringing issues, etc.)
Also, related to GD is what has been mentioned by Mark100 as "smearing" in the time domain. This is really a non-issue and it pains me when people make such a big deal about time coherency and linear phase filters. Sure, you can show on a scope or in your simulator that when the input is a square wave the output looks terrible. But that is not at all a representation of how our hearing process works! You cannot hear the time smearing effects until they become quite significant indeed, and this gets back to the group delay threshold that I mentioned above. But in general, if the components of a signal are not arriving exactly in time to reproduce the time domain waveform at the driver output, that should not keep you up at night.
The solution would be to use a smaller woofer, or go 3 way. Or just live with the lobing issue, or use a tweeter in a waveguide like the SEOS-8, which is meant to accept some dome tweeters like the Dayton RS-28A/F. The problem is that the 8" is getting directional towards the crossover point, while a 1" dome will be omni there, and the change in power response at the crossover point is can make the system sound tonally "off" in the listening room, especially in smaller sized rooms. On the other hand, the waveguide has some directionality to it as low as 2k, and that better matches the woofer's directionality resulting in a smooth transition in power response at the crossover. This typically sounds better in the room. Also the wavguide will boost up the lower end of the tweeter's response, and you have to flatten this out by cutting power. This has the effect of increasing the system power handing and decreasing tweeter distortion around the crossover point. Give it a look.
Regarding group delay and high order crossovers: even LR4 has a peaking group delay, and results in a different group delays for the woofer and tweeter in their passbands. Scroll down towards the bottom of section "F" in this web page for an example of this:
Linkwitz on Group delay and transient response
The question is is the non-uniform GD enough to cause audible effects? Even though LR4 is peaking, it's typically not exceeding the threshold of about 1.5msec of GD around 1k-2kHz that is purportedly audible on music signals. The threshold could be a bit higher, but there is very little data to support it in the literature. Also, this threshold gets much larger away from this critcal band of hearing. Using a high order crossover for your subwoofer, for example, is nothing to worry about.
The peaking GD is due to high Q poles in the crossover. When the pole Q starts exceeding about 2 or 3 this usually means high GD. An example of this is found at the link provided above. Of course I am talking about analog or IIR digital filters here. With FIR you can do whatever you want, but I feel that is a fallback position many people go to without really needing to, as FIR has its downsides as well (latency, pre-ringing issues, etc.)
Also, related to GD is what has been mentioned by Mark100 as "smearing" in the time domain. This is really a non-issue and it pains me when people make such a big deal about time coherency and linear phase filters. Sure, you can show on a scope or in your simulator that when the input is a square wave the output looks terrible. But that is not at all a representation of how our hearing process works! You cannot hear the time smearing effects until they become quite significant indeed, and this gets back to the group delay threshold that I mentioned above. But in general, if the components of a signal are not arriving exactly in time to reproduce the time domain waveform at the driver output, that should not keep you up at night.
<snip>Using a higher order crossover actually makes the situation worse, since many will have a sharp "knee", which means that there is more power going to the tweeter just above the knee. <snip
Not necessarily, you can control the shape of the knee by using a small value resistor in the shunt leg of the woofer (for the woofer), and increase filter Q by using the smaller shunt L (for the tweeter) to control the apex of the slopes. I used up to 6th order passive XO like this, and I daresay active filters offer finer control than is possible this way.
Not necessarily, you can control the shape of the knee by using a small value resistor in the shunt leg of the woofer (for the woofer), and increase filter Q by using the smaller shunt L (for the tweeter) to control the apex of the slopes. I used up to 6th order passive XO like this, and I daresay active filters offer finer control than is possible this way.
Sure, you can drop the responses down in the knee, but then your crossovers will no long sum to 1 and the system will have a dip in the frequency response at the crossover point. I'm not sure that is helpful in general. I am assuming that you are keeping the same corner frequencies. If on the other hand you are also changing the crossover frequencies (moving them close together) to compensate for introducing the softer knee, and you are controlling the relative phase angle, then that is certainly a valid way but it has to be done on a case-by-case basis and including the driver responses.
I can recall a couple of examples of higher order filters that had something like a 6dB/oct slope for the first ~1 octave and then steepened. This can work well.
- Home
- Loudspeakers
- Multi-Way
- Steep Crossovers...3 steps forward, 2 steps back?